Lower Design
Base
- Initial Considerations
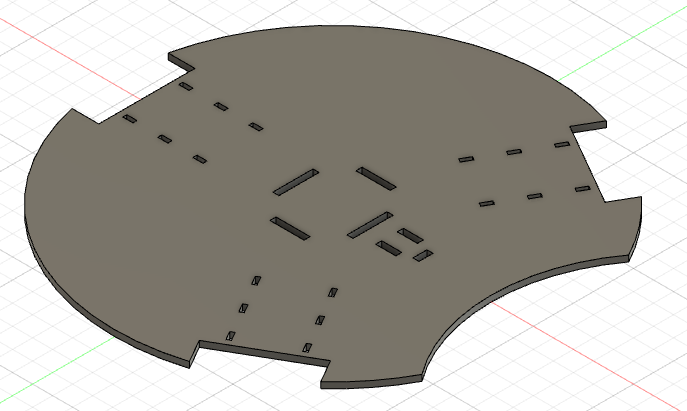
We started by considering a base that could let us maximize the area permited by RCJ rules. We didn't make the exact dimensions because the rules state that the robot needs to fit smoothly into a cilinder of this diameter, so we had to leave a bit of leeway.
We also considered for a long time to use bases to support the PCBs. This was to keep them in a rigid piece of the robot and also to possibly give a padding to it to prevent vibrations in the PCBs. In the final implementation however, we ended up not using them because we never ended up using the padding, and connecting the PCBs alone wasn't as rigid but still maintained them correctly in place.
- Implementation
We ended up following the main ideas on our initial considerations, with some slight adjustments
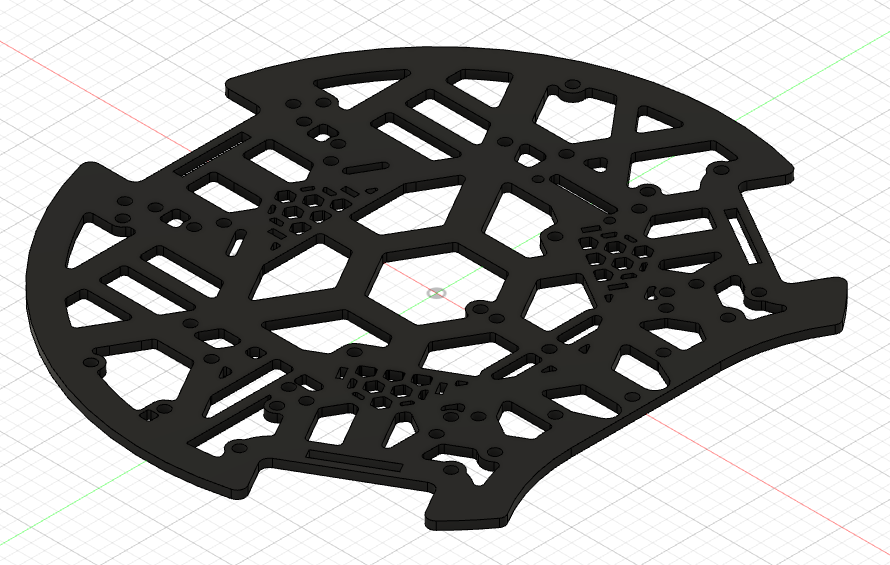
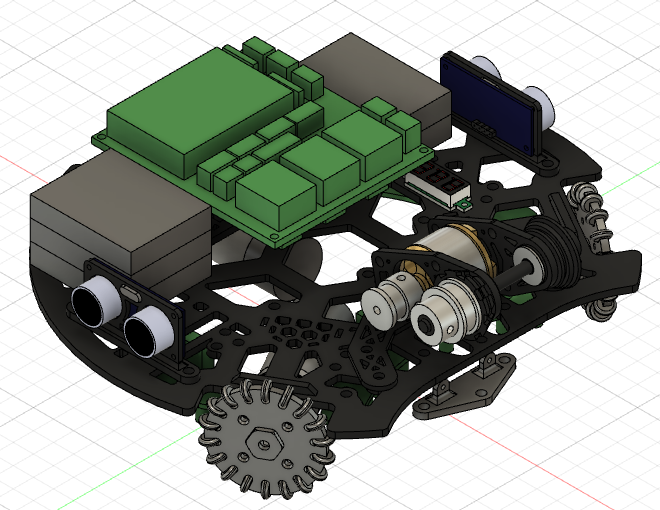
The main base has the holes to support the following modules and pieces: the main PCB, the line PCBs, the voltage regulator, the IR ring, the dribbler, the ultrasonic sensor supports, the motor supports and zipties.
Once these supports were added, the
- Problems
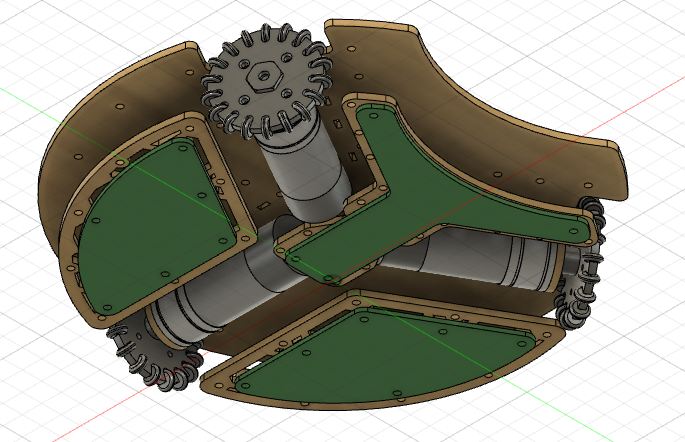
The design did let us maximize the area, but it also caused a few issues. Although it did let us take more space and make it easier to block the ball, it conversely leaves a very small space to the . The 3 motor design didn't work very well and the implementation of a kicker wasn't possible.
Motors
- Initial Considerations
We had the idea that to keep the motors in place we could use multiple zip ties to tie it onto the base, which would be easy to implement and lightweight. After initial testing, there was minimal jiggle to the motors and overall worked really well.
-
Implementation
-
Problems
Wheels
Dribbler
Kicker
- Initial considerations
Our first approach to the kicker was that we wanted to focus on it later on in the implementations only as a possibility. The kicker was # 5 on our priority list, after the dribbler.
We thought that the kicker was not very important, because of its weight and difficulty to implement. This is why we didn't focus on it since the beginning, and because of this we couldn't even attempt to implement it due to the lack of space.
-
Implementation
-
Problem
The problem with implementing the kicker was that we didn't focus on it since the beginning and once we wanted to consider it, it would involve basically changing everything about the robot. The base design and the positioning of the motors made it difficult to fit it into our robot. If a kicker would be implemented, we would suggest to follow the base design suggested above.