Display
In order to allow interaction with the robot and receive visual feedback, a diplay was integrated to the robot.
Interface
For full customization, the interface was developed as a Next.js web application, using Typescript, React and TailwindCSS. In addition, to connect to ROS, roslib was used. This is a Javascript library that uses websockets to connect with rosbridge, allowing for the web application to both publish and subscribe to ROS topics.
Features
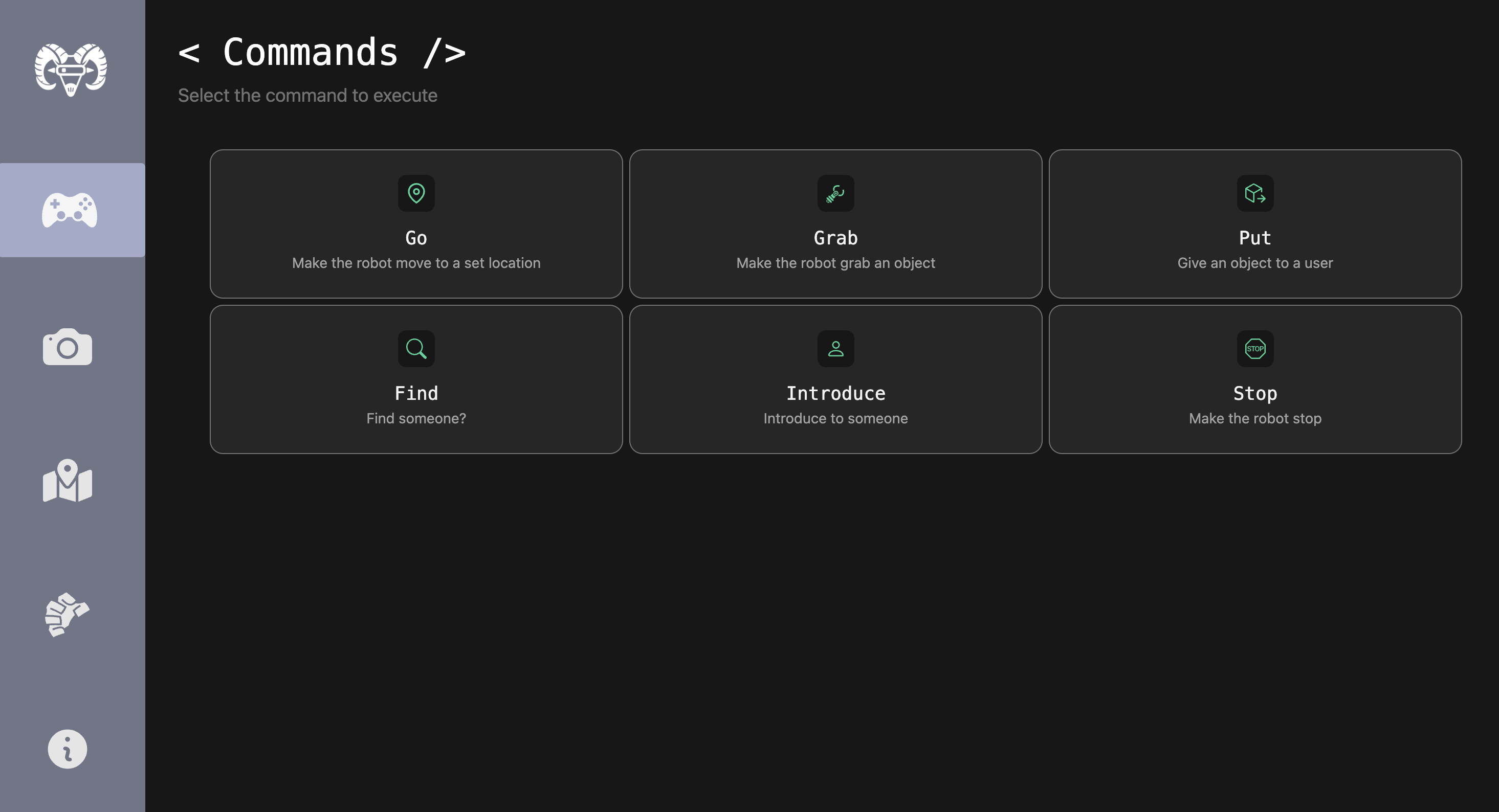
Users can interact with the display through a navigation bar that allows access to different sections:
-
Commands: Taking advantage of the main engine, this section shows basic commands for the robot to follow, these being: Go, Grab, Put, Find, Introduce and Stop, each having further options or locations accordingly in order to publish a topic with the desired command.
-
Camera: Shows the Zed camera feed, with the option to visualiza human recognition or object detection frames.
-
Navigation: Still in development, this section allows the user to visualize the the navigation status through RVIZ web.
-
Status: Shows basic information about the robot, such as current task or debugging messages.