ArUco detection
Aruco
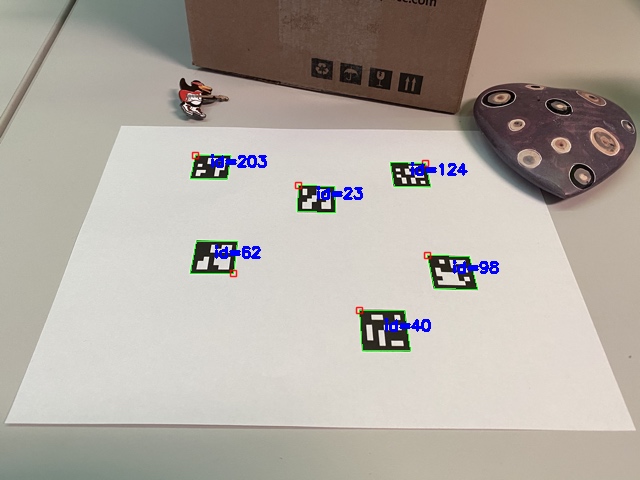
An ArUco marker is a synthetic square marker composed of a wide black border and an internal binary matrix that determines its identifier.
Integration
ArUco detection was integrated using ArUco library from OpenCV, getting ArUco bounding boxes and aruco class, using the following code:
import cv2
import cv2.aruco as aruco
from vision_utils import *
import numpy as np
dictionary = cv2.aruco.Dictionary_get(cv2.aruco.DICT_4X4_50)
parameters = cv2.aruco.DetectorParameters_create()
cap = cv2.VideoCapture(0)
while True:
# Capture a frame from the camera
ret, frame = cap.read()
# Convert the frame to grayscale
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# Detect ArUco markers
corners, ids, rejectedImgPoints = cv2.aruco.detectMarkers(gray, dictionary, parameters=parameters)
# Print list of detected ArUco markers and their corners
print(ids)
if corners:
for i, marker_corners in enumerate(corners):
print(ids[i])
corner = corners[0][0]
xmayor = np.amax(corner[:, 0])
ymayor = np.amax(corner[:, 1])
xmenor = np.amin(corner[:, 0])
ymenor = np.amin(corner[:, 1])
print(f"Xmayor: {xmayor:.2f}, Xmenor: {xmenor:.2f}, Ymayor: {ymayor:.2f}, Ymenor: {ymenor:.2f}")
# Draw detected markers on frame
frame_with_markers = cv2.aruco.drawDetectedMarkers(frame, corners, ids)
# Show output frame
cv2.imshow("Output", frame_with_markers)
# Exit if 'q' key is pressed
if cv2.waitKey(1) & 0xFF == ord('q'):
break
# Release the camera and close all windows
cap.release()
cv2.destroyAllWindows()