Maze Exploration Algorithm
It is based in a Depth exploration using DFS as an algorithm with Dijkstra as path planning algorithm. This implementation avoids blue and black tiles while keeping record of the victims already detected.
Implementation
First, the algorithm was based on a basic DFS exploration implemented with recursion and back movements. However, when leading with embedding systems, memory and execution time should be the most optimal. Therefore, recursion was not an option and using dynamic memory was not available. So, an iterative DFS algorithm was implemented along with a linked list performed as a Stack. Moreover, to optimize back-movements, a reverse movement was applied to optimize the robot’s positions, but to optimize the exploration it should implement a path planner and the perfect algorithm was Dijkstra. Finally, Tiles were optimized, data structures were stablished at a custom size due to the lack of memory in the ESP32 microcontroller and implemented a map saving function.
DFS Exploration
This was implemented with a clockwise priority, focusing on always exploring to the front, this algorithm was selected due to the movements and time optimization. It was implemented alongside four data structures: stack of unvisited coordinates, array of visited coordinates, array of tiles, and array of tiles coordinates.
Dijkstra Path Planning
For path planning algorithm, this algorithm was used for searching and identifying the shortest path from the starting tile to the end tile. The path was obtained based on weights for each tile, and each coord of the path was saved in a stack for easy navigation.
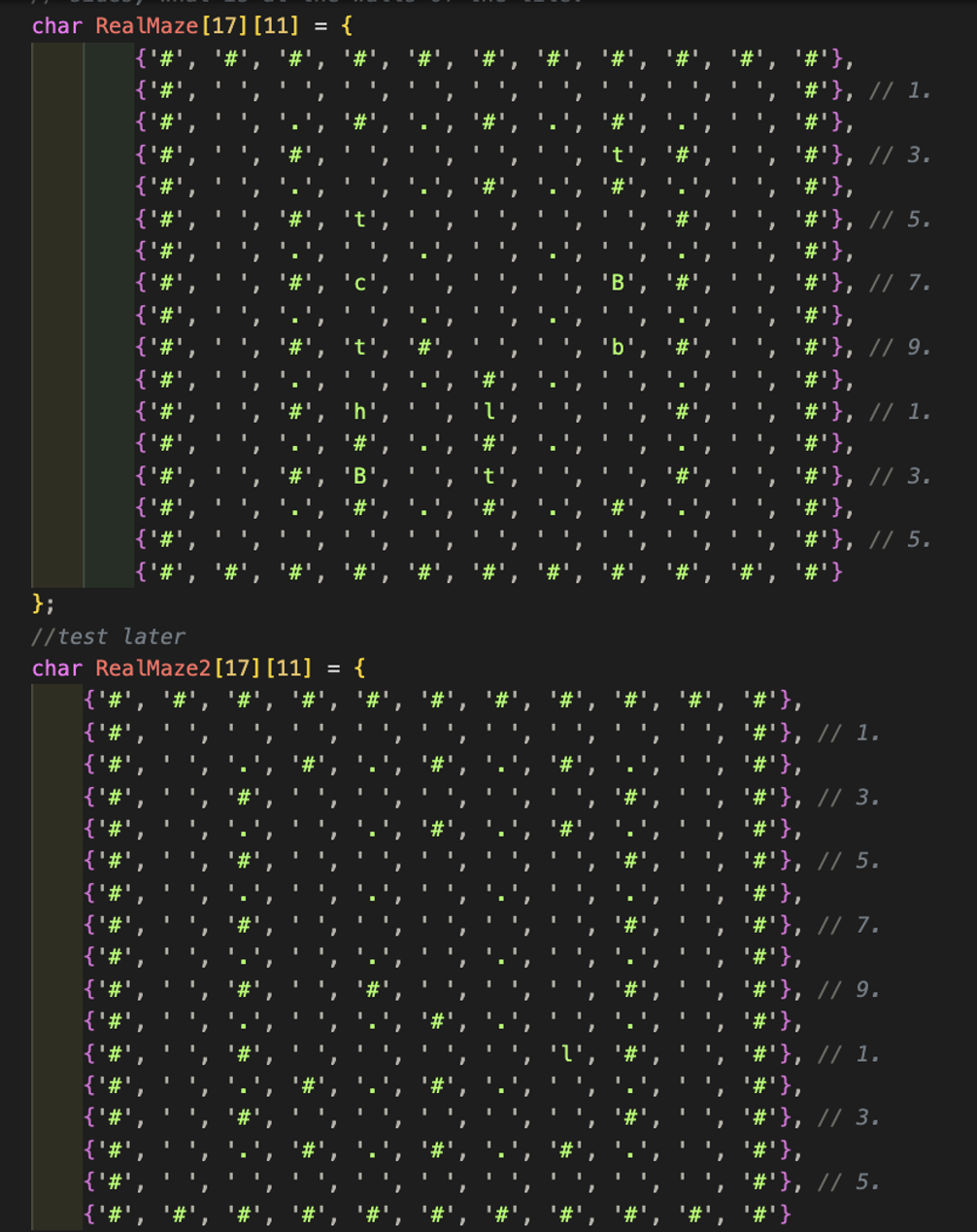
Tiles
Each Tile object saves important information about each tile, such as victims, checkpoints, obstacles, black tiles, adjacent tiles and walls direction. Also set weights for different tiles type, like blue, black, wall and white tiles.
Victims
Since it can be just one victim per tile, each tile can save up to one victim per tile. Therefore, a system was implemented for dealing with victims in 90 degrees angle and in endpoints.
Map & Button
A map saving function was implemented for handling checkpoints and could retrieve map information that was already explored. However, this function was not available due to other problems regarding checkpoint detection. Moreover, a full reset of the map was implemented in the robot. On the other hand, the button function was implemented with a time-based system, where if the button was pressed over half a second, it will restart the ESP microcontroller reinitializing all the sensors, but when pressed less than this time, it will restart just the algorithm.
Ramps
A multiple level maze exploration algorithm was implemented, handling the tiles assignment when detected a ramp up or down. It was saved inside the map, and the robot can continue the exploration in multiple levels.
Main problems
We encounter with different logic and resources problems. Initially we had Stack Overflow problems due to the RAM of the microcontroller, where we were forced to reduce the amount of information we can keep inside the ESP to a limited size. Also, a logic problem emerged when exploring the map, since Tiles where duplicated inside the map and the solution was to check if the tile exists after added to the map.
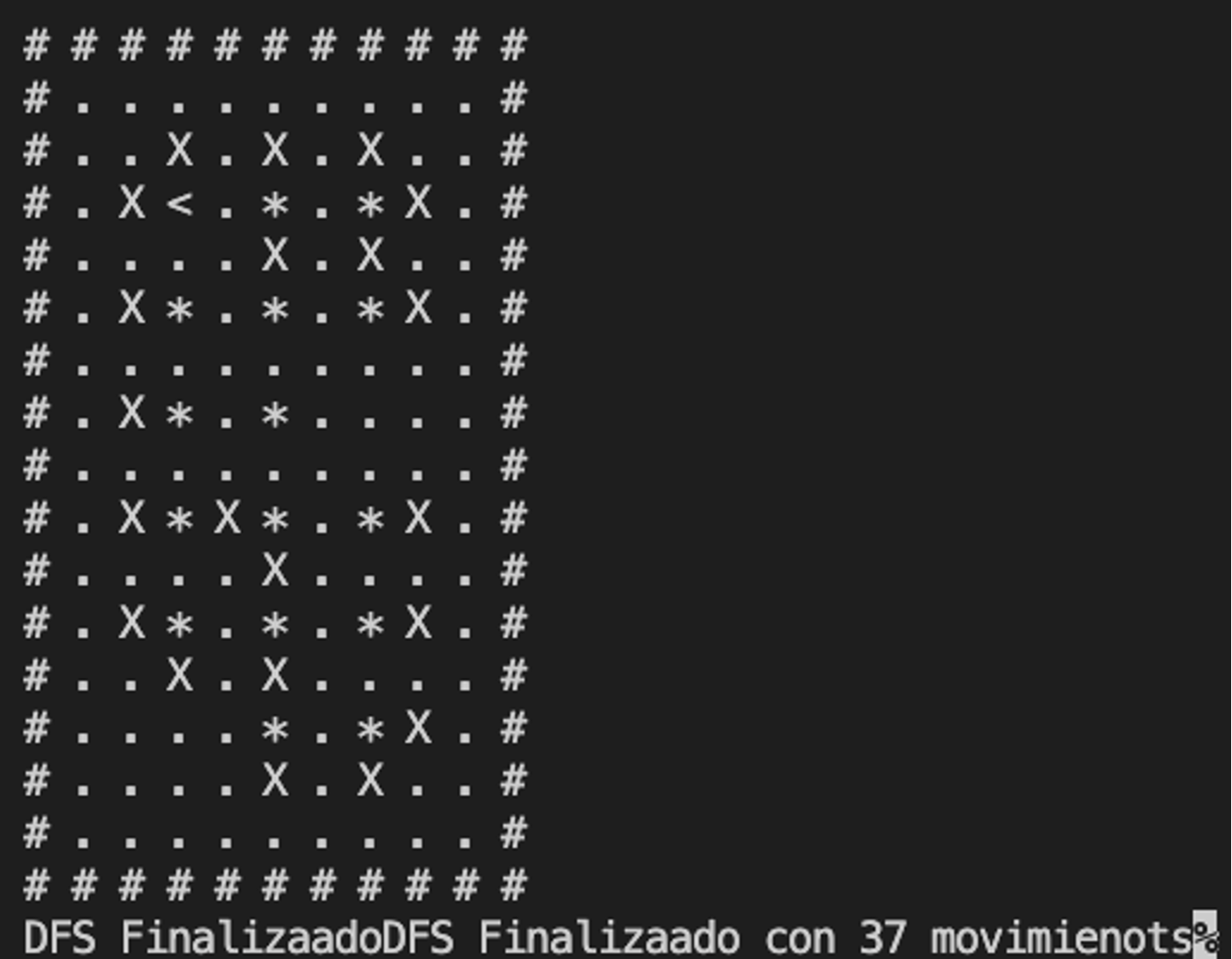
Console Tests – Support diagrams
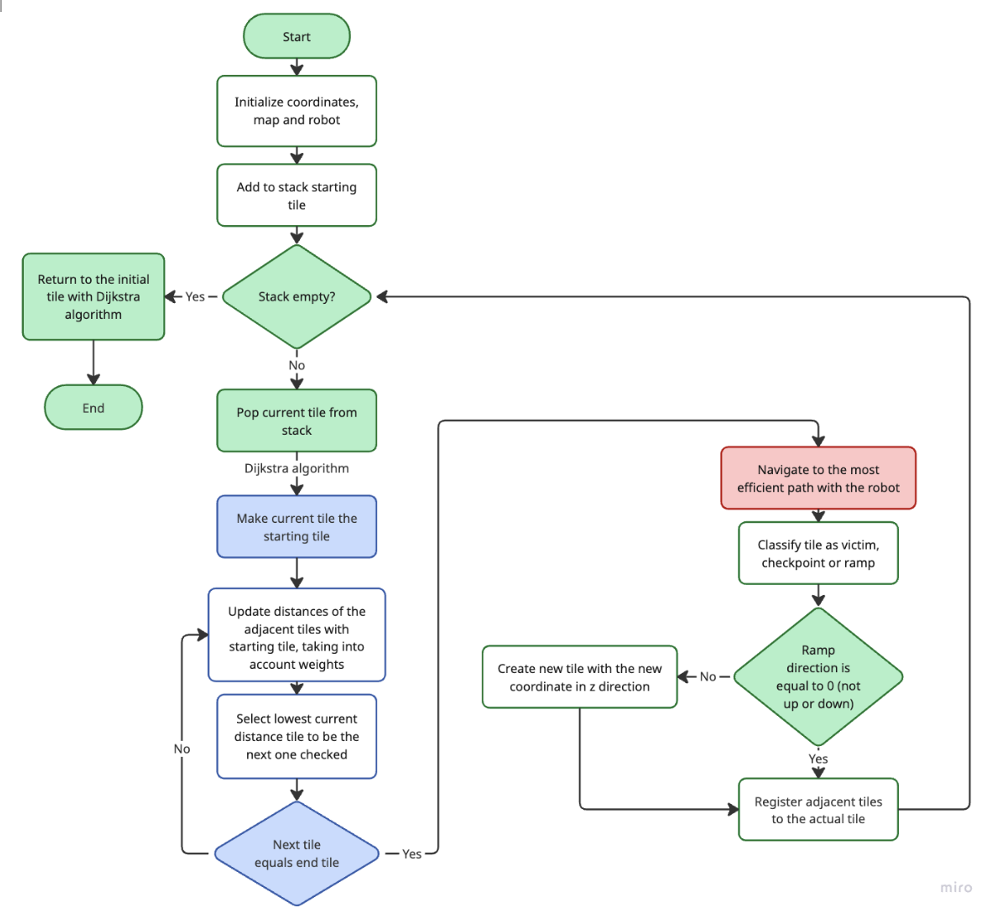
Algorithm Flowchart
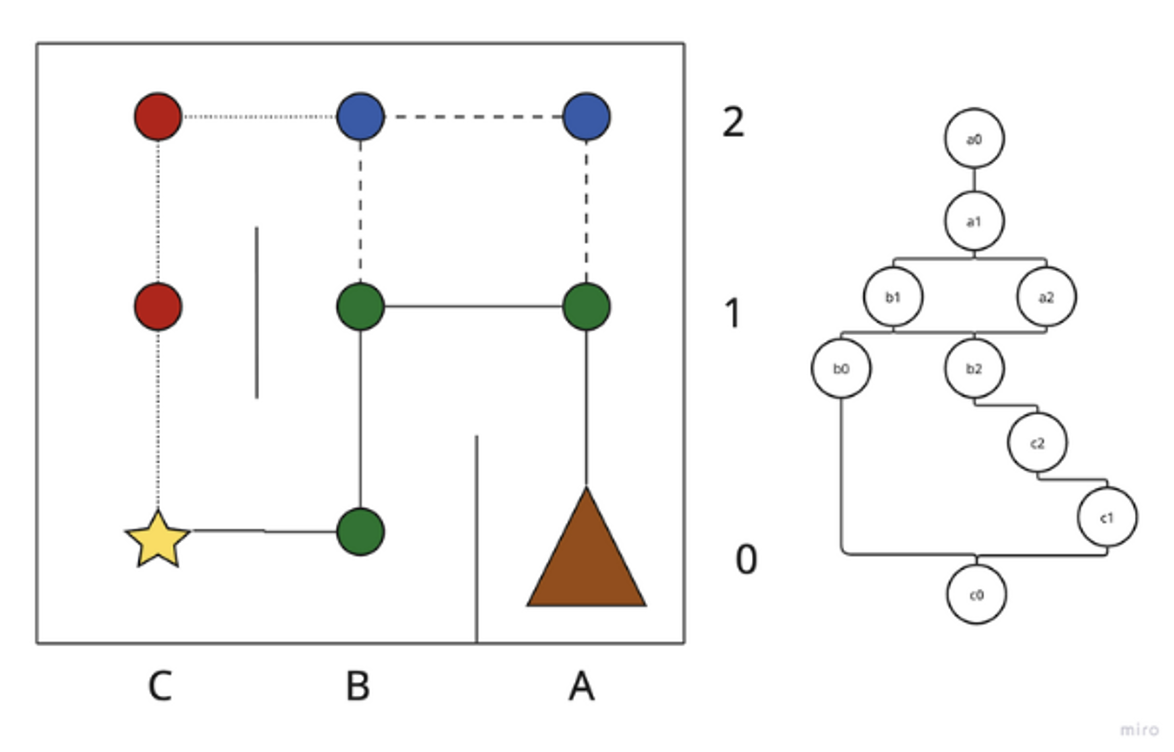
Maze Graphical Representation