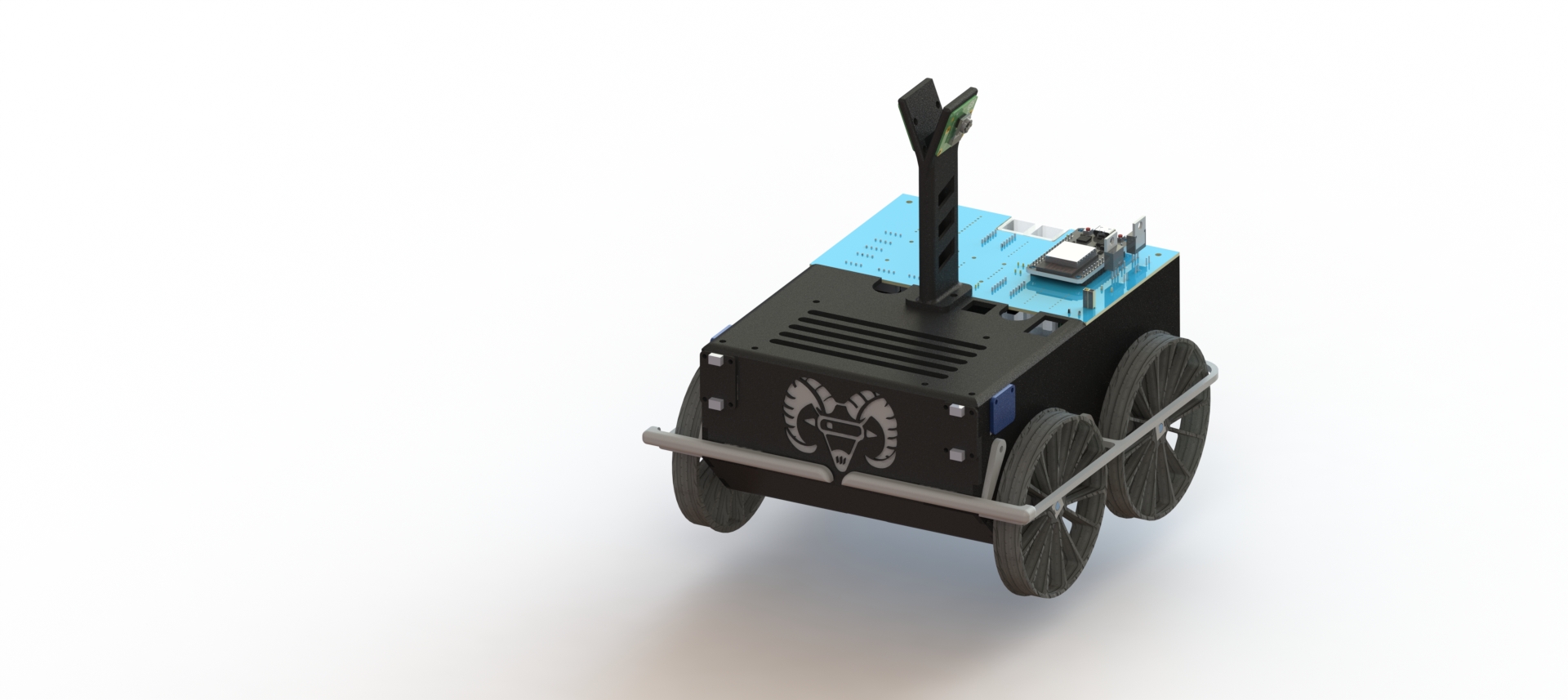
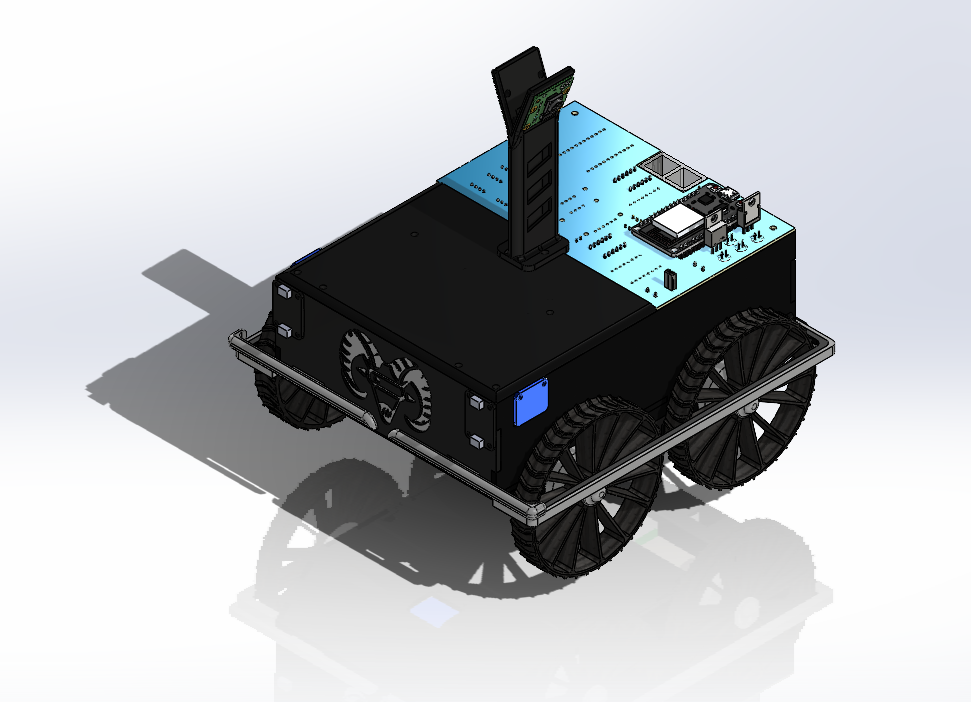
Overall CAD
The robot was designed using SolidWorks. Its design was thought to be modular and easily modifiable.
There are 3 main parts to the design, first the battery holder which goes in between the suspension system, then the next floor which hold the suspension system, the dispenser and the Jetson nano, finally, the last floor which is open from the top and has all the necessary sensors as well was the PCB.
In general, the main chassis was strong and modular, but it also had a bigger size than the ideal one. It could have been made more compact and that could have helped during the competition and passing through or around some obstacles.