Robot Systems
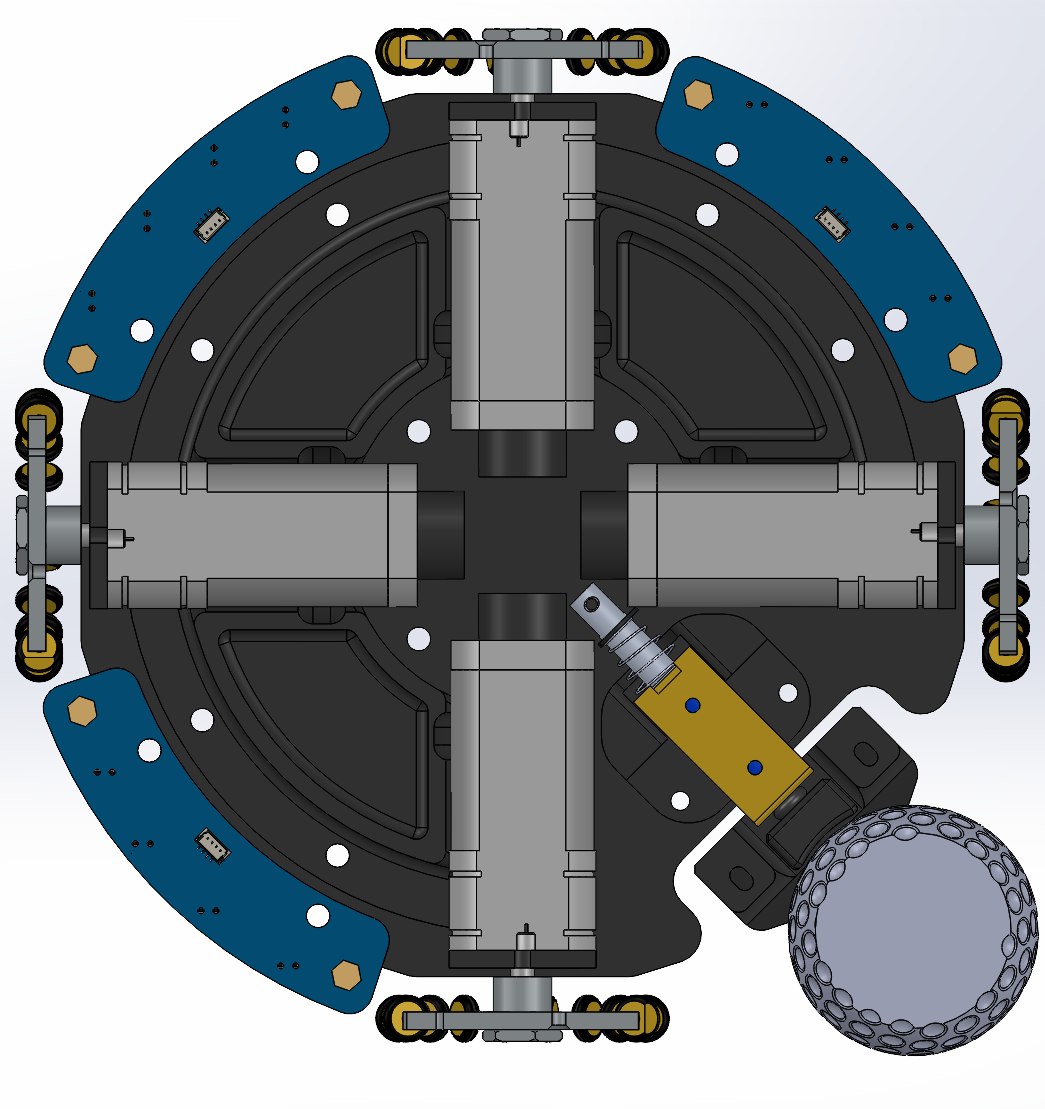
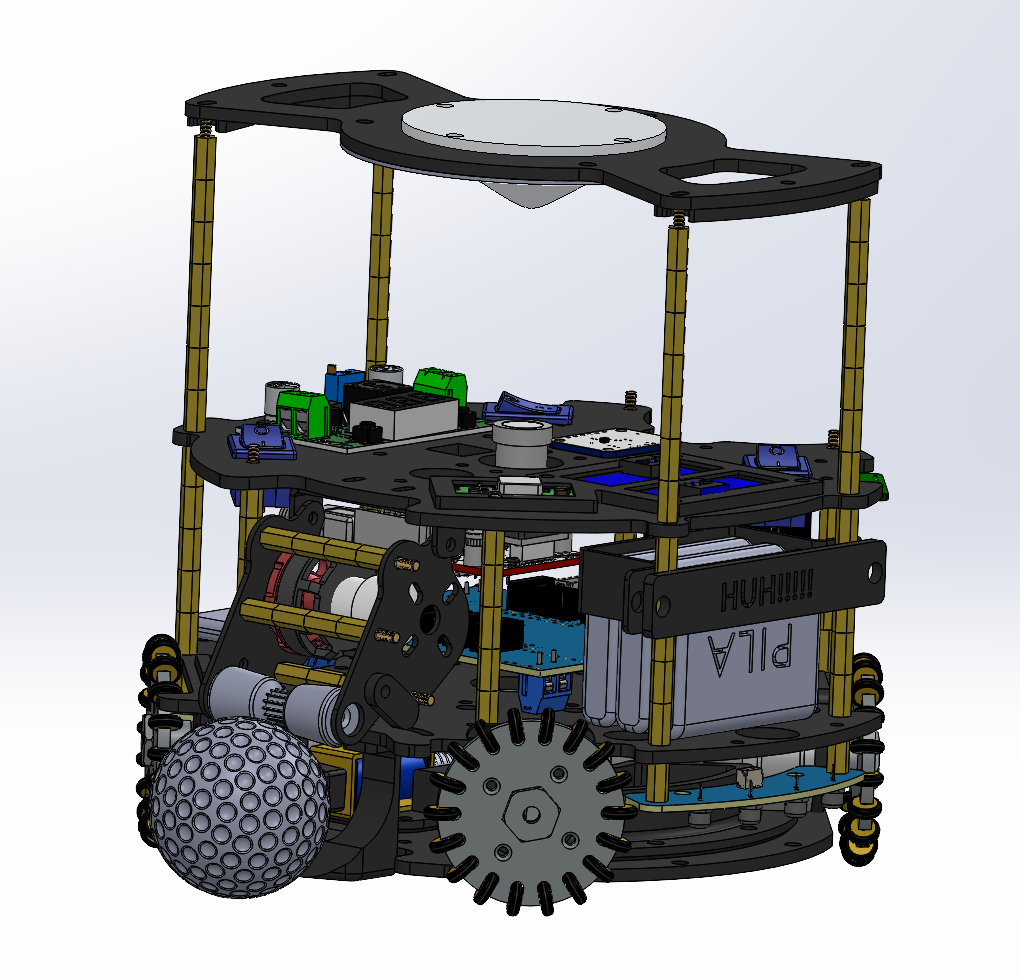
Structure Materials:
Robot chassis: Primarily MDF with acrylic reinforcements, secured with brass spacers and screws. 3D printed pieces were used for non-critical areas.
Dribbler:
Made from 1/16in aluminum, some pieces were bent to shape. Designed for easy adjustment to accommodate manufacturing error. "Roller" component: 3D printed pulley paired with a black silicone molded shape for its gripping abilities.
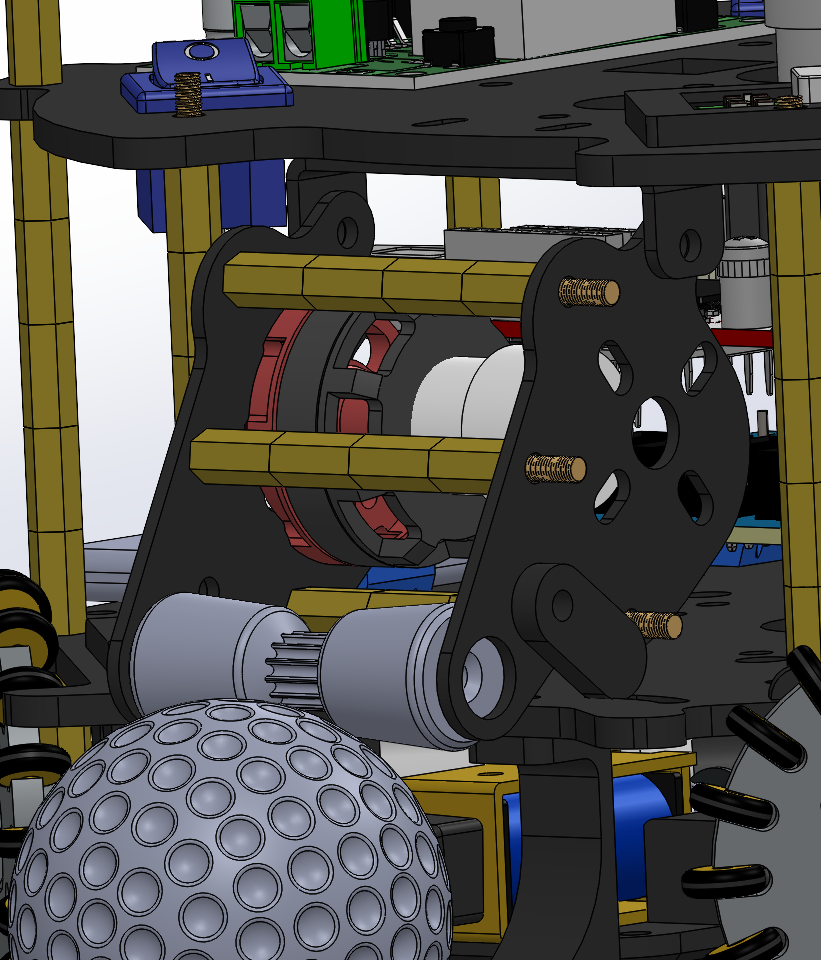
Kicker:
A 5 volt solenoid was used due to size and availability. The kicker 3d printed piece was inserted by heat.